
FPGA數(shù)字納米電渦流傳感器ZED60可提供高分辨率,非接觸式測量導電目標的位置變化。該系統(tǒng)包括驅(qū)動器電子設(shè)備和針對特定材料和量程范圍進行校準的探頭。此傳感器可提供極高的精度,具有數(shù)字核心和按鈕控件。ZED60提供與目標位置變化成比例的線性模擬電壓,以及具有用戶編程的開關(guān)設(shè)定點的數(shù)字開關(guān)(設(shè)定點)輸出。
畫冊下載
FPGA數(shù)字納米電渦流傳感器ZED60特點:
(1)、基于 FPGA 的數(shù)字系統(tǒng),易于設(shè)置和高性能
(2)、線性度:0.2%
(3)、分辨率:最高10nm
(4)、帶寬:100 Hz、1 kHz、10 kHz、15 kHz(用戶可選)
(5)、易操作,自帶偏移和設(shè)定點按鈕(前面板和遠程)
(6)、范圍指示LED燈
(7)、可同步多臺設(shè)備(出廠時作為單個系統(tǒng)發(fā)貨)
(8)、0-10 VDC 輸出和設(shè)定點開關(guān)輸出
(9)、探頭可在潮濕等惡劣的環(huán)境中使用,可定制真空探頭
其他:
1、 延長電纜
用探頭延長電纜校準的傳感器必須在安裝了延長電纜的情況下運行,以符合規(guī)范要求。在未安裝延長電纜的情況下運行將導致檢測結(jié)果不準確。
2、 探頭安裝
如果多個探頭安裝在一起,它們之間的間隔必須至少為 3 倍探頭直徑的距離。除被測對象外,探頭兩側(cè)(3 倍探頭直徑的距離)及后側(cè)(1.5 倍探頭直徑的距離)的區(qū)域內(nèi)應無任何金屬物體。否則,將需要執(zhí)行定制校準。
3、 未接地靶
未接地靶存在將噪聲引入傳感器的可能性。如果輸出端異常嘈雜,請務(wù)必確保靶處于接地狀態(tài)。在移動/旋轉(zhuǎn)靶時,可用小金屬刷或與地面連接的金屬薄片來實現(xiàn)接地。
4、 多臺傳感器
當多臺傳感器與同一個靶一同使用時,必須同步傳感器。互連電路板與多個驅(qū)動器的后部連接,提供同步信號。相應的互連電路板附帶了多個傳感器命令,并且驅(qū)動器被固定在一起,作為一臺裝置使用。
重要的是,每臺 ZED60 均與正面的“所用探頭的序列號”標簽上顯示的探頭連接。
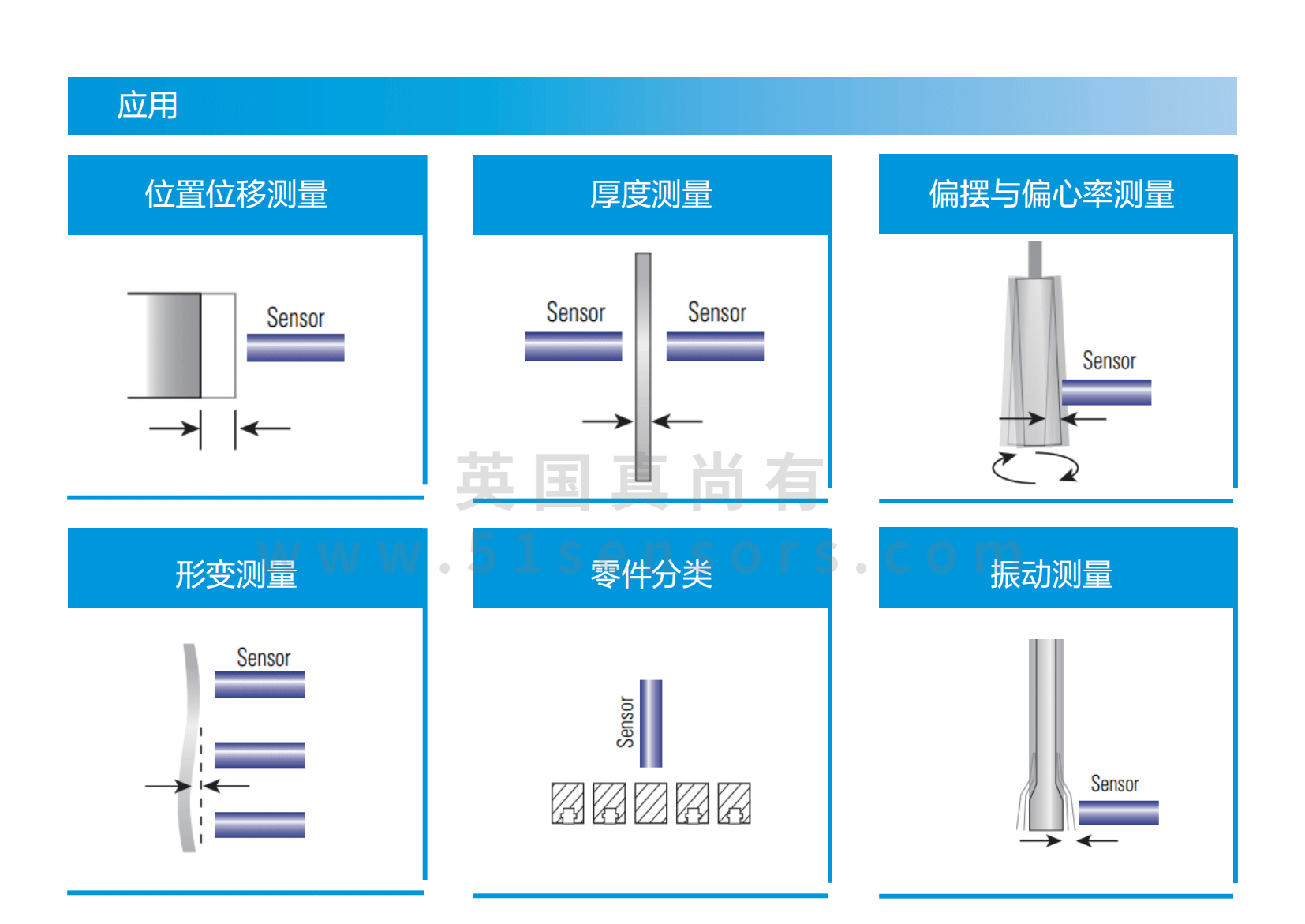
FPGA數(shù)字納米電渦流傳感器ZED60應用領(lǐng)域:
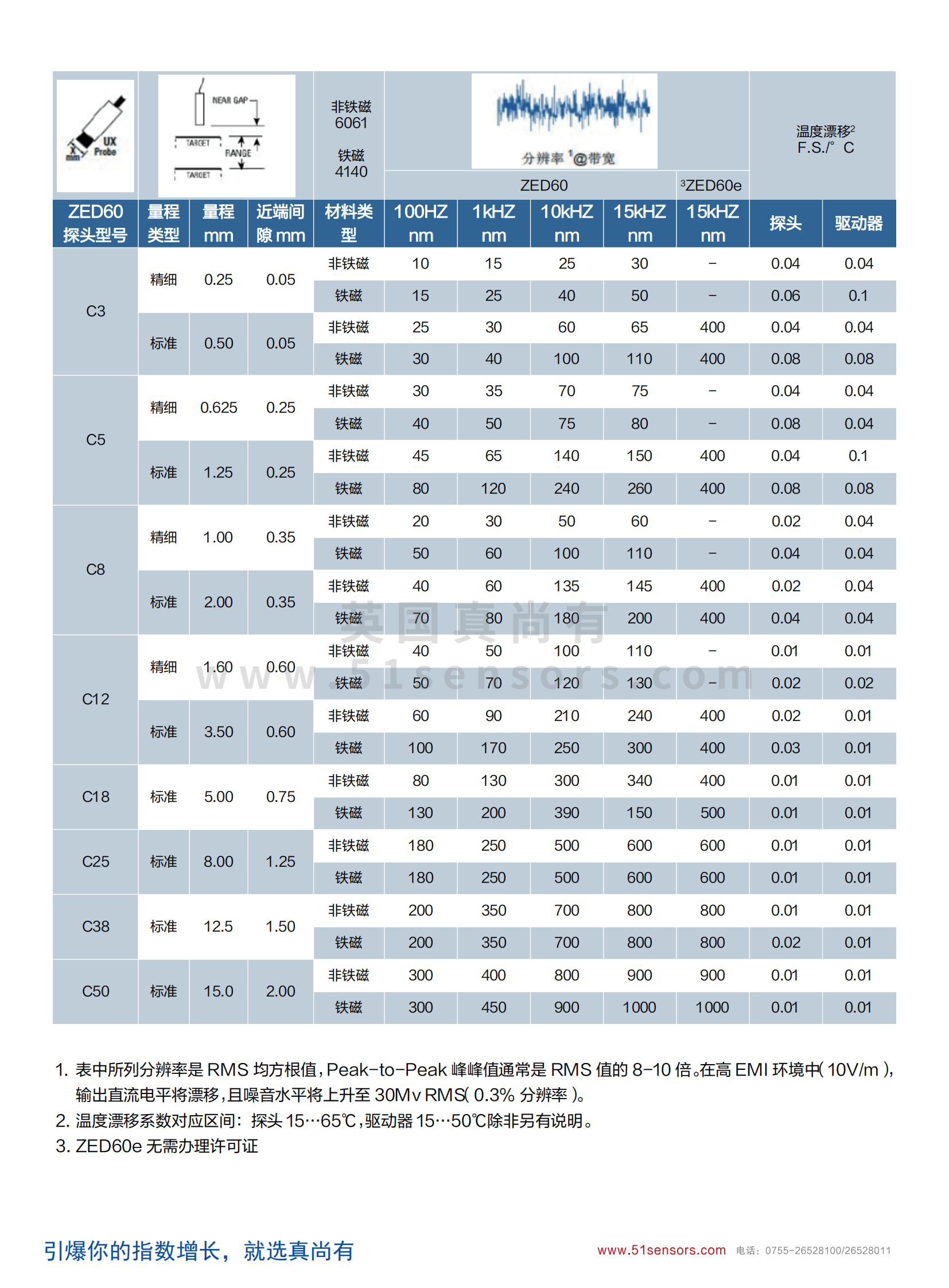
FPGA數(shù)字納米電渦流傳感器ZED60技術(shù)規(guī)格:


FPGA數(shù)字納米電渦流傳感器ZED60測量原理:
電渦流傳感器產(chǎn)生在探頭尖端的交流磁場,當這個磁場靠近導電材料時,會在材料中引發(fā)小型電渦流。這些電渦流產(chǎn)生與傳感器磁場相反的磁場。隨著探頭和目標之間的距離縮小,磁場交互發(fā)生變化。傳感器的電子設(shè)備測量這一磁場的相互作用,并產(chǎn)生與磁場變化成比例的輸出電壓。
FPGA數(shù)字納米電渦流傳感器ZED60應用領(lǐng)域:
FPGA數(shù)字納米電渦流傳感器ZED60安裝尺寸:

內(nèi)徑測量儀精密輪廓檢測系統(tǒng)微觀型面測量系統(tǒng)靜態(tài)形變測量系統(tǒng)精密在線測厚系統(tǒng)振動測量系統(tǒng)無人警衛(wèi)船光伏清潔機器人智能垃圾壓實機智能機器人自穩(wěn)定無人機起落平臺空氣質(zhì)量檢測儀橋梁結(jié)構(gòu)健康檢測系統(tǒng)其他檢測系統(tǒng)
焊縫分析軟件3D數(shù)據(jù)處理軟件工業(yè)物聯(lián)網(wǎng)平臺電渦流軟件預測分析軟件AI軟件計算機視覺平臺數(shù)據(jù)平臺解決方案服務(wù)免代碼軟件集成平臺定制軟件
測速測長_測距傳感器 | 測距儀皮米級電容位移傳感器線激光輪廓掃描儀 | 線掃激光傳感器激光位移傳感器線性位置傳感器光譜共焦傳感器Kaman傳感器系統(tǒng)干涉儀測徑儀 | 測微計 | 激光幕簾千分尺傳感器納米平臺光柵傳感器地下探測儀光纖傳感器太赫茲傳感器液位測量傳感器傾角 | 加速度測量傳感器3D掃描傳感器視覺相機 | 3D相機水下測量儀磁耦合線性執(zhí)行器磁場傳感器雷達傳感器石墨烯霍爾效應傳感器卷材位置傳感器振動測量傳感器結(jié)構(gòu)檢測傳感器監(jiān)控電渦流傳感器水聽器校準器無線光學通訊傳感器網(wǎng)關(guān)納米級電渦流傳感器其它檢測設(shè)備
0755-26528100
0755-26528011
18145802139(微信同號)







