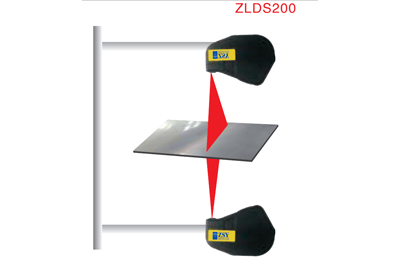
二維測(cè)厚系統(tǒng)是通過使用兩個(gè)激光二維傳感器頭對(duì)射的方法來進(jìn)行測(cè)厚,采樣區(qū)域是一段面區(qū)域,同時(shí)它還可以在掃描測(cè)厚過程中還原被測(cè)體的表面輪廓細(xì)節(jié)。
Z軸量程最小10mm,最大1165mm;
Z軸最高5um精度;
X軸量程最小8mm,最大1010mm;
可按用戶要求定制;
無需控制器,直接網(wǎng)口輸出(也可選模擬輸出);
測(cè)量不受色彩、表面材質(zhì)或離散光線所影響;
有同步輸入端,可使多個(gè)傳感器同步工作;
傳感器提供了DLL庫,便于開發(fā)人員開發(fā)應(yīng)用程序;
保護(hù)等級(jí)IP67;
帶雕刻花紋的木板、有槽或突起的鋁合金板等物體。
用領(lǐng)域-1(無原圖,有水印).jpg")
用領(lǐng)域-2(無原圖,有水印).jpg")
用領(lǐng)域-3(無原圖,有水印).jpg")
用領(lǐng)域-4(無原圖,有水印).jpg")
型號(hào) | 二維測(cè)厚系統(tǒng) |
Z軸量程mm | 3~300(可定制) |
X軸量程mm | 8~240(可定制) |
Z軸線性度% | 0.05 |
X軸線性度% | 0.1 |
最高測(cè)量頻率Hz | 6510 |
測(cè)量距離mm | 25~500(可定制) |
◆其他量程可根據(jù)具體要求訂制。
◆我們保留規(guī)格變化而不另行通知的權(quán)利。
利用兩個(gè)激光傳感器的對(duì)射方式進(jìn)行厚度測(cè)量,將傳感器固定在穩(wěn)定的支架上,確保兩個(gè)傳感器的激光能再同一點(diǎn)上。
假設(shè)
A:是上面激光傳感器到被測(cè)物的距離。
B:是下面激光傳感器到被測(cè)物的距離。
C:是兩個(gè)激光傳感器的距離。
被測(cè)物的厚度H=C-(A+B)
量原理-2.jpg") ZLDS202傳感器的工作原理是基于光學(xué)三角測(cè)量原理。
ZLDS202傳感器的工作原理是基于光學(xué)三角測(cè)量原理。
半導(dǎo)體激光發(fā)生器①發(fā)出的光,經(jīng)透鏡②形成X平面光幕,并在物體⑦上形成一條輪廓線③,鏡片④收集被物體反射回來的光并將其投影到一個(gè)二維CMOS陣列⑤,這樣形成的目標(biāo)物體剖面圖形被信號(hào)處理器⑥分析處理,輪廓線的長度用X軸計(jì)量,輪廓線的高低用Z軸計(jì)量。
量原理-1.jpg")
制造行業(yè),如帶花紋的木板的測(cè)厚和不規(guī)則水泥板等物體的測(cè)厚。
金屬冶金行業(yè),如有槽或突起的釹合金板,鋼板等物體的測(cè)厚。
制造行業(yè),如帶花紋的木板的測(cè)厚和不規(guī)則水泥板等物體的測(cè)厚。
金屬冶金行業(yè),如有槽或突起的釹合金板,鋼板等物體的測(cè)厚。
型號(hào) | 二維測(cè)厚系統(tǒng) |
Z軸量程mm | 3~300(可定制) |
X軸量程mm | 8~240(可定制) |
Z軸線性度% | 0.05 |
X軸線性度% | 0.1 |
最高測(cè)量頻率Hz | 6510 |
測(cè)量距離mm | 25~500(可定制) |
◆其他量程可根據(jù)具體要求訂制。
◆我們保留規(guī)格變化而不另行通知的權(quán)利。

英國真尚有_ZLDS200激光二維傳感器(已升級(jí)到ZLDS202)

英國真尚有_低成本_線激光輪廓掃描儀|線掃激光傳感器|激光二維傳感器|ZLDS202(原ZLDS200升級(jí)款)
低成本線激光輪廓掃描儀ZLDS202專為高精度二維輪廓掃描而設(shè)計(jì),同時(shí)具備速度(高達(dá)16KHz)、精度和卓越性能,線激光傳感器的Z軸具有0.01%的線性度,X軸具有高達(dá)2912個(gè)點(diǎn)的分辨率 ,可穩(wěn)定且高精度測(cè)量所有難以檢測(cè)的物體。
ZLDS202系列包括:
ZLDS202 — 內(nèi)置測(cè)量功能的激光輪廓掃描儀;
ZLDS202-HS —高速版本,不低于4000 輪廓/秒 (全量程),不低于16000 輪廓/秒 (ROI模式).;
ZLDS202-HSR — 高速高精度版本,不低于1000 輪廓/秒 (全量程),不低于16000 輪廓/秒 (ROI模式).X軸分辨率為1280或2560個(gè)點(diǎn).
ZLDS202-HSR2 — 高速高精度超寬激光線版本(X軸寬度/Z軸量程≥2.5),不低于4000 輪廓/秒 (全量程),不低于16000 輪廓/秒 (ROI模式).X軸分辨率為1280或2560個(gè)點(diǎn).
ZLDS202-2Cam — 內(nèi)置測(cè)量功能和工業(yè)協(xié)議的雙頭激光輪廓掃描儀;
畫冊(cè)下載
![]() 英國真尚有_低成本、可定制線激光傳感器_輪廓掃描儀ZLDS202 V1.0.pdf
英國真尚有_低成本、可定制線激光傳感器_輪廓掃描儀ZLDS202 V1.0.pdf

英國真尚有_直連焊接機(jī)器人的線激光輪廓掃描儀|焊接專用線激光傳感器|ZLDS202Smart-Weld
ZLDS202Smart-Weld激光焊縫跟蹤系統(tǒng)旨在作為工業(yè)機(jī)器人焊接系統(tǒng)的一部分,在焊接過程中自動(dòng)控制焊接頭的位置、測(cè)量焊接坡口的幾何參數(shù),并為操作人員提供焊接過程可視化控制的可能。
系統(tǒng)的主要部件是ZLDS202Smart-Weld激光二維掃描儀,采用該傳感器讓我們?yōu)闄C(jī)器人焊接創(chuàng)建了真正的智能解決方案。
ZLDS202Smart-Weld激光焊縫跟蹤系統(tǒng)目前市場(chǎng)上唯一一個(gè)由掃描儀本身生成焊接軌跡、將焊槍保持在最佳位置,并將路徑坐標(biāo)(或速度)傳輸給機(jī)器人控制器的的系統(tǒng)。
畫冊(cè)下載
汽車行業(yè)智慧城市鐵路/公路行業(yè)航天航空高溫專區(qū)機(jī)械制造智能制造輪胎橡膠芯片制造鋼鐵行業(yè)手機(jī)行業(yè)真空專區(qū)礦產(chǎn)能源衛(wèi)星通訊水利港口
內(nèi)徑測(cè)量儀精密輪廓檢測(cè)系統(tǒng)微觀型面測(cè)量系統(tǒng)靜態(tài)形變測(cè)量系統(tǒng)精密在線測(cè)厚系統(tǒng)振動(dòng)測(cè)量系統(tǒng)無人警衛(wèi)船光伏清潔機(jī)器人智能垃圾壓實(shí)機(jī)智能機(jī)器人自穩(wěn)定無人機(jī)起落平臺(tái)空氣質(zhì)量檢測(cè)儀橋梁結(jié)構(gòu)健康檢測(cè)系統(tǒng)其他檢測(cè)系統(tǒng)
焊縫分析軟件3D數(shù)據(jù)處理軟件工業(yè)物聯(lián)網(wǎng)平臺(tái)電渦流軟件預(yù)測(cè)分析軟件AI軟件計(jì)算機(jī)視覺平臺(tái)數(shù)據(jù)平臺(tái)解決方案服務(wù)免代碼軟件集成平臺(tái)定制軟件
測(cè)速測(cè)長_測(cè)距傳感器 | 測(cè)距儀皮米級(jí)電容位移傳感器線激光輪廓掃描儀 | 線掃激光傳感器激光位移傳感器線性位置傳感器光譜共焦傳感器Kaman傳感器系統(tǒng)干涉儀測(cè)徑儀 | 測(cè)微計(jì) | 激光幕簾千分尺傳感器納米平臺(tái)光柵傳感器地下探測(cè)儀光纖傳感器太赫茲傳感器液位測(cè)量傳感器傾角 | 加速度測(cè)量傳感器3D掃描傳感器視覺相機(jī) | 3D相機(jī)水下測(cè)量儀磁耦合線性執(zhí)行器磁場(chǎng)傳感器雷達(dá)傳感器石墨烯霍爾效應(yīng)傳感器卷材位置傳感器振動(dòng)測(cè)量傳感器結(jié)構(gòu)檢測(cè)傳感器監(jiān)控電渦流傳感器水聽器校準(zhǔn)器無線光學(xué)通訊傳感器網(wǎng)關(guān)納米級(jí)電渦流傳感器其它檢測(cè)設(shè)備
0755-26528100
0755-26528011
18145802139(微信同號(hào))





